Satsukiの工作展
私がこれまでに作成した、3Dプリンタ、タミヤ、LEGOなどを使った工作を展示しています。ロボット、子ども用おもちゃ、天体観測機材などが中心です。代表作については、またいつかブログで詳細をご紹介できればと思っています。もし気になるものがあれば、コメントやTwitterでご連絡ください。
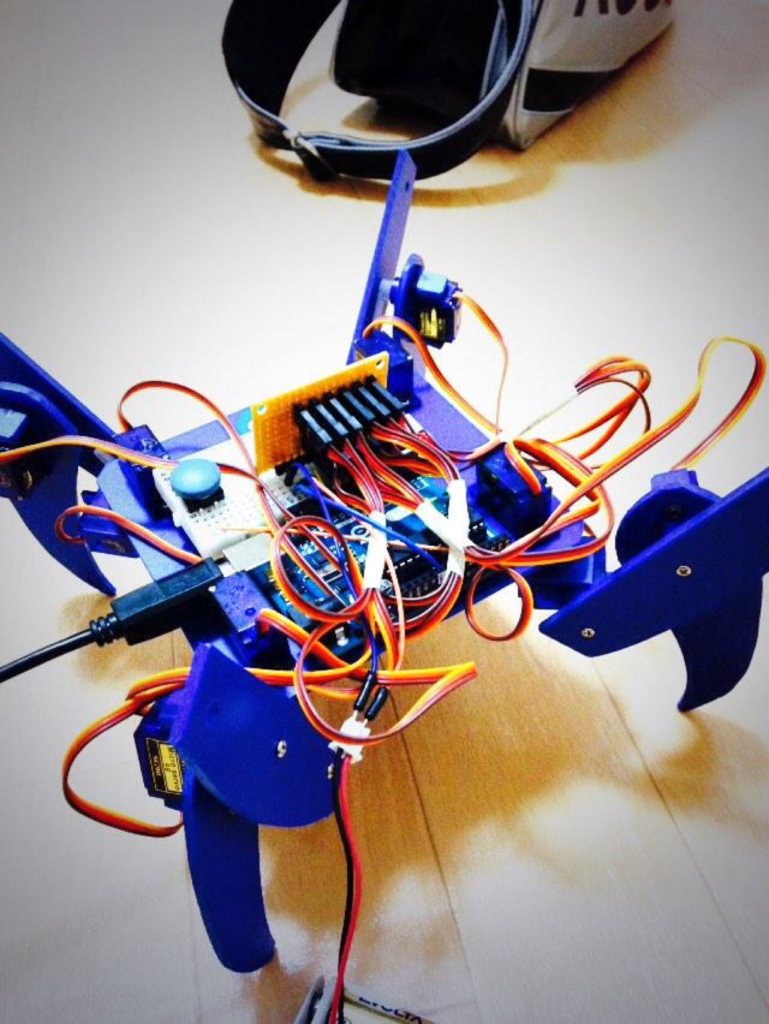
三叉スケーター1
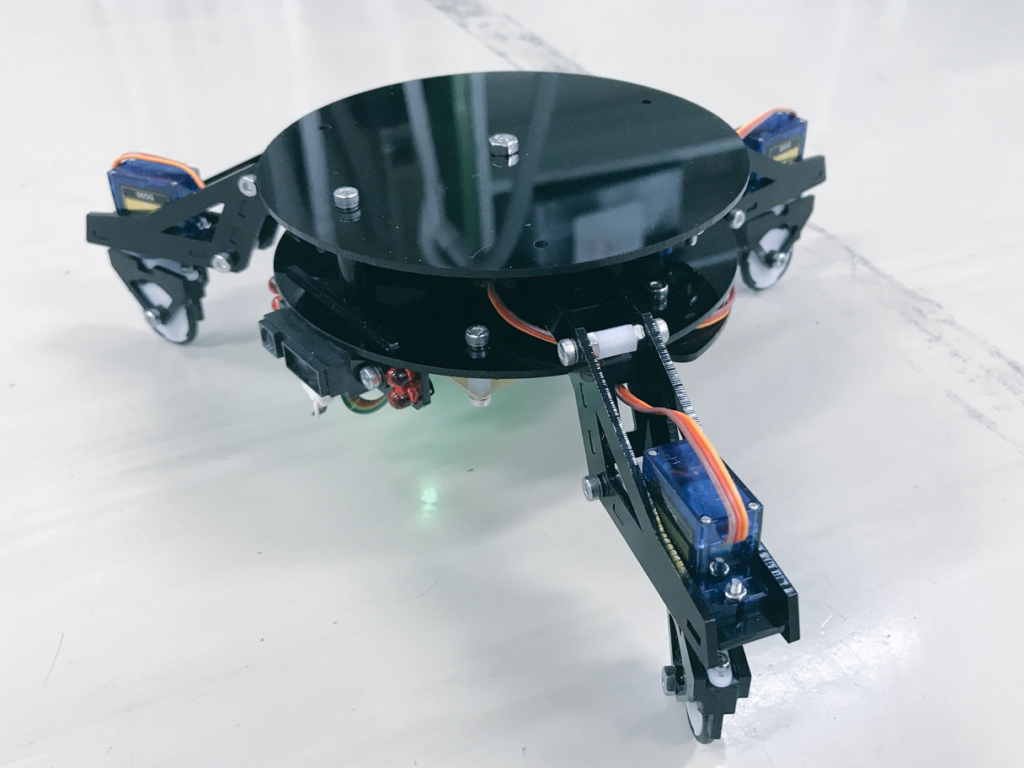

2017年に製作した代表作の一つ。足の先端についている3つの車輪は受動輪、すなわち動力を持たないキャスター。この受動輪の向きを変えるための足首の3つのサーボモータと、足を動かす2本のサーボモータの、計5つのモータで、地面を全方向にスイスイ滑る移動ロボット。
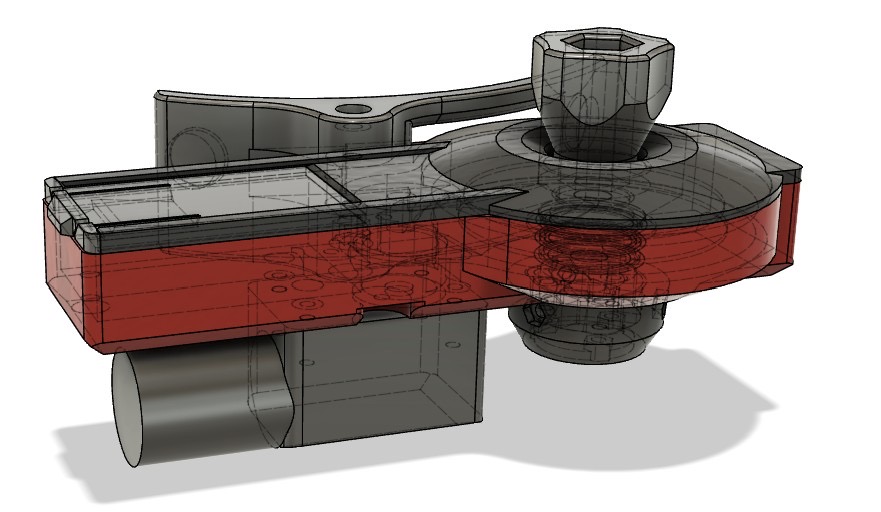
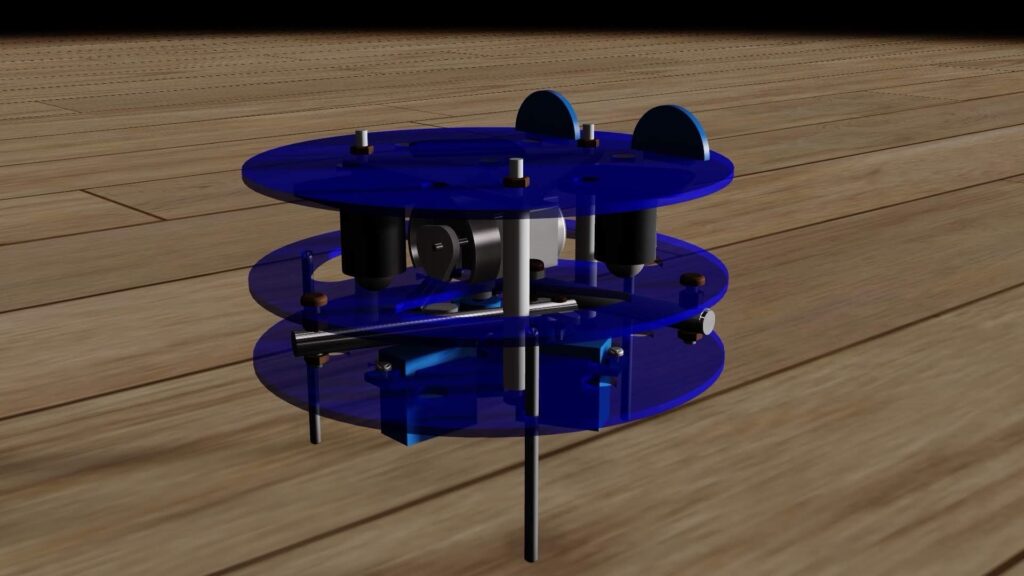
三叉スケーター2

「シルエットがかわいいロボット」をテーマに2021年頃に構想していたロボット。CADはFusion 360を使用。取り組んだ時期に仕事が忙しかったこともあり、未完成。
Omni Snake


2020年に製作した代表作の一つ。2つの2自由度関節を持つヘビロボット。初めて個人の3Dプリンタを購入し、その直後に作った完全オリジナルロボット。胴体にオムニホイールとディファレンシャルギアを組み込むことで、全方向移動を実現している。オムニホイールはあくまでも受動輪。運動学を利用することで、車輪を回転させることなく、関節の運動だけで、前進、回転、横移動と、多彩な動きができる。このロボットには、面白い機械要素やノウハウがたくさん詰まっているため、いつかこのブログでも紹介記事を書きたい。
ロボット柔軟関節


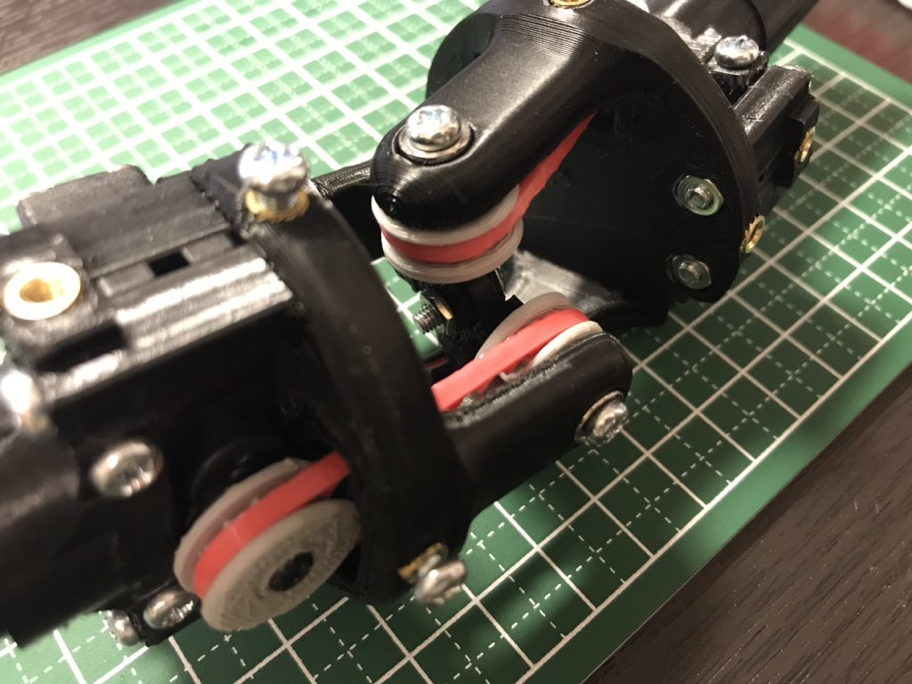
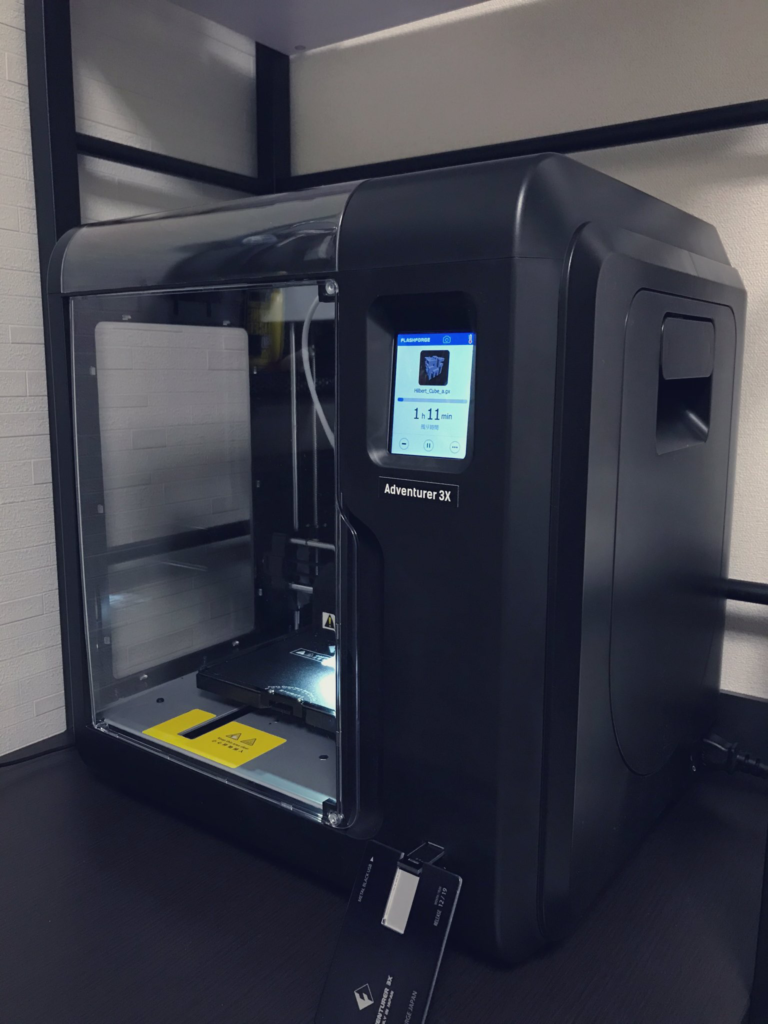
Omni Snake開発のための試作品。TPUフィラメントを使うことで、柔軟な蛇腹構造を3Dプリンタで実現できる。また、タイミングベルトも造形可能。3DプリンタはAdventurer 3Xを使用。
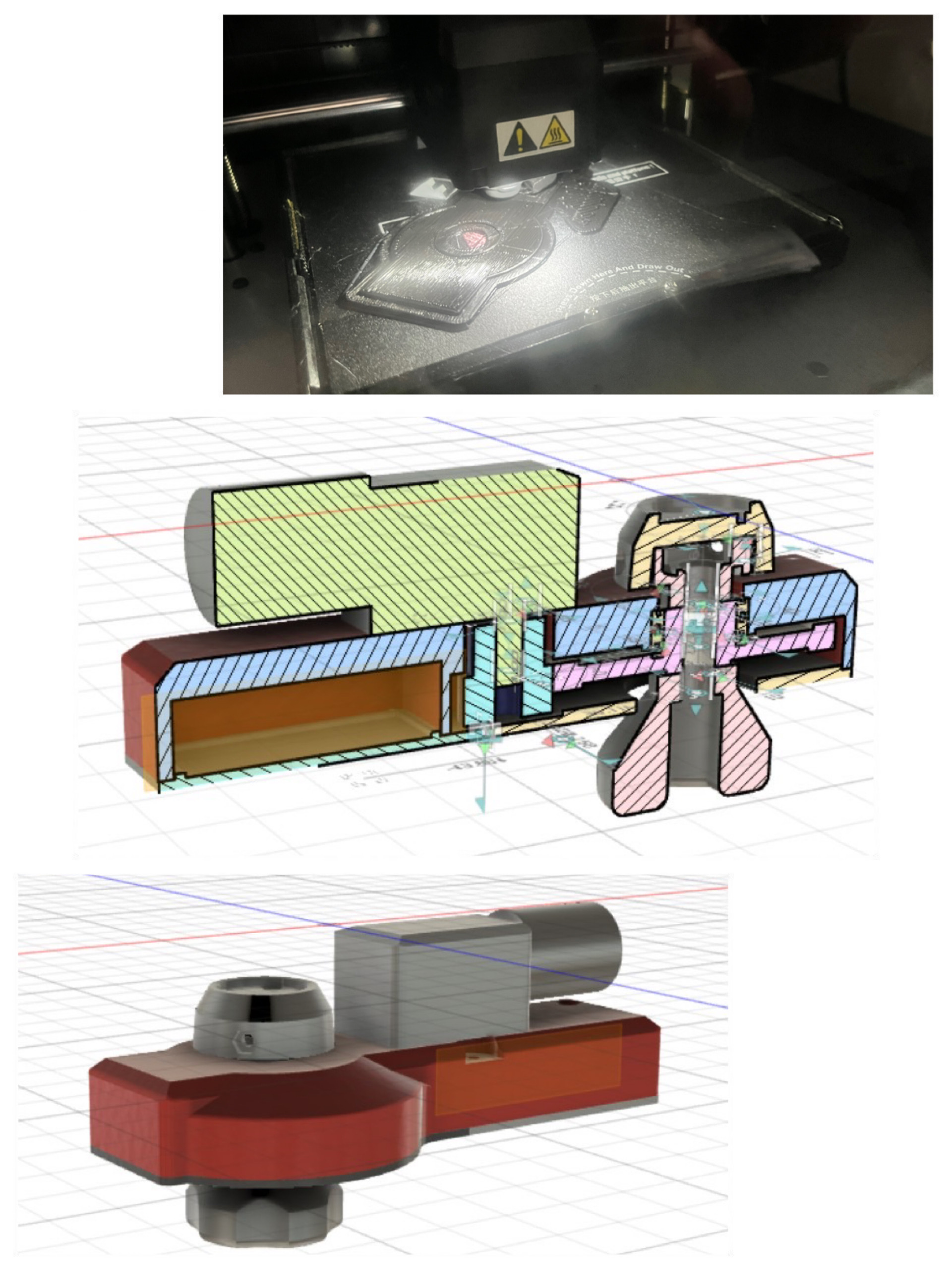
オムニホイール


2020年にOmni Snakeの部品として製作。樽はシリコンチューブをカットして使用しており、グリップ力◎。樽一つ一つに、金属のシャフトと、POMのブッシュ軸受を組み込んでおり、低抵抗に仕上がった。
Simplest Snake
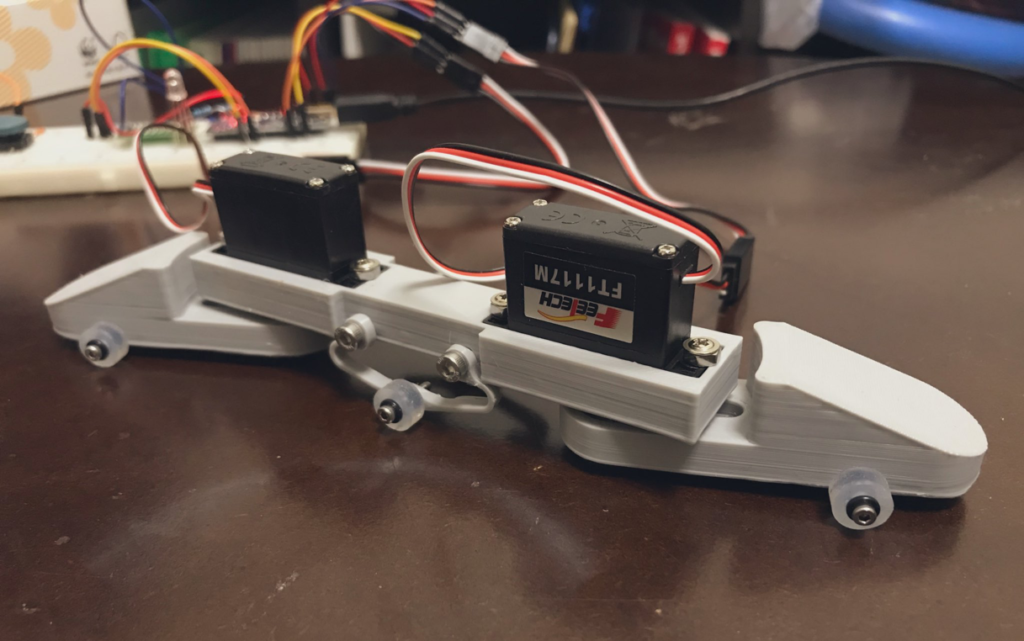
2020年に製作。Omni Snake で余ったホイールで作成したヘビロボット。2つのモータを交互に動かすことで、前後に移動できる。
ハイローチェア電動機

2025年8月に、0歳の娘のハイローチェアを電動化するために制作。詳細はこちら。
電動フォーカサー
2024年に製作。電視観望の際に、電動でピントを合わせるために作成。詳細は後日ブログにて紹介予定。
ニュートン望遠鏡 光軸調整機構
2025年1月着想。ニュートン望遠鏡の副鏡(斜鏡)の光軸調整をしやすくする発案。通常の機構では、鏡の傾きを変えると中心位置も同時に変わってしまうが、この機構は位置を固定して傾きだけを調整できる。4節リンク機構の瞬間中心を応用している。実物は現在製作中。
ドブソニアン望遠鏡

初の自作望遠鏡。試作中。
自作バーチャルウォール


2022年に制作。自宅のルンバが玄関の段差から転落するのを防ぐために、ルンバが嫌う赤外線信号を出している。市販品より格段に安くコンパクトに仕上がった。またコンセントから電源をとっており、電池切れの心配もない。現在もトラブルなく稼働。Arduino ProMiniを使用。
Magnet Board
2021年に制作したiPad用無料アプリ。好きな背景の上にカラフルなカードを貼り付けられるシンプルなデザインで、個別指導塾の座席管理や、スポーツの戦術ボードとして好評。


立体万華鏡


2019年に作成。マジックミラーによる多面体の稜線に、テープLEDを貼ることで、光が多重に反射して無限の空間が広がる。とても綺麗。
スマホスタンド

2020年に作成。3Dプリンタで作成した、スタンド機能付きのスマホカバー。
飛び出すハロ

2019年に制作。ガンダムのハロのプラモデルを、光ながら耳をパタパタするように改造。
三脚歩行ロボ
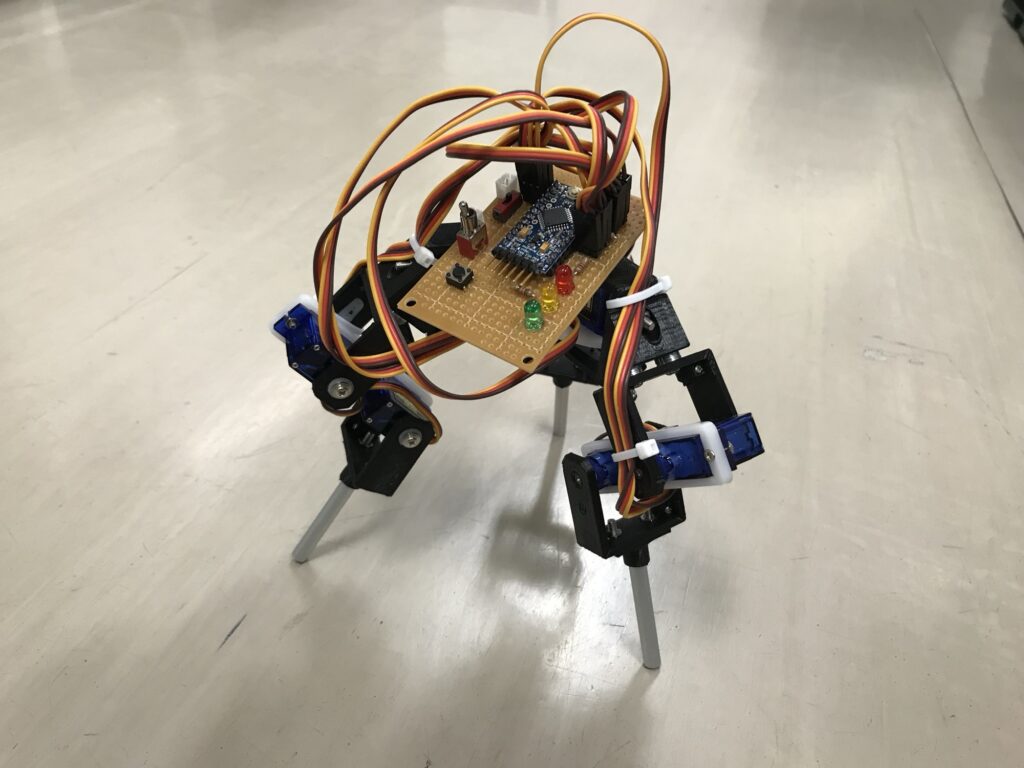
2018年制作。足先に着座センサを搭載した三脚の歩行ロボット。他で忙しくなり、開発は中断。
制御工学スタンプ
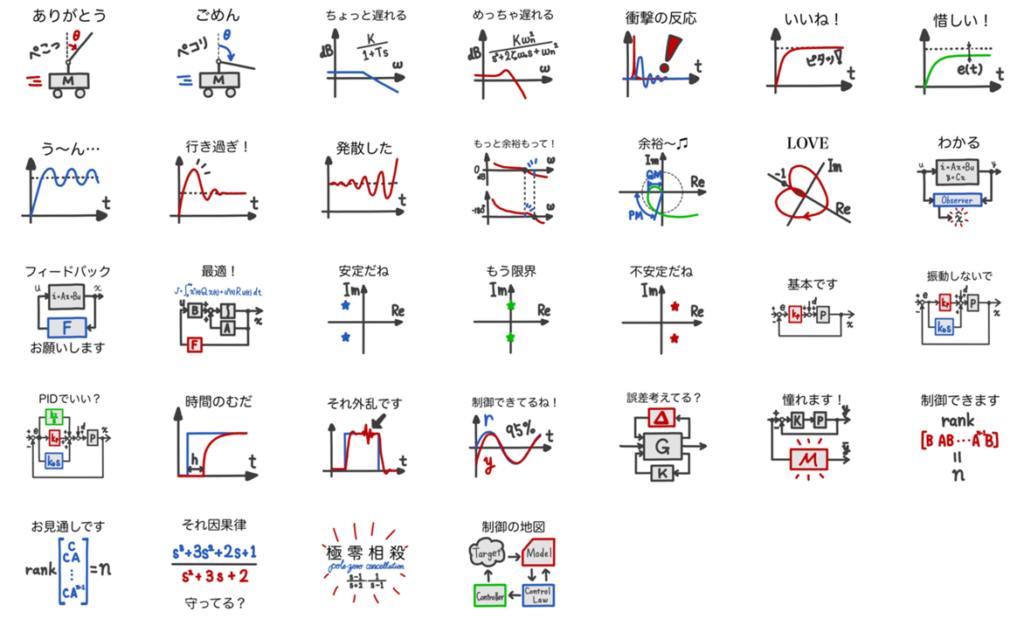
2019年作成。制御工学を題材にしたスタンプ。日常会話に非常に便利。【ここから購入】
年末の帰省時に、夢中でiPadにお絵かきして作成した。代償として肩こりで年始から風邪を引いた。
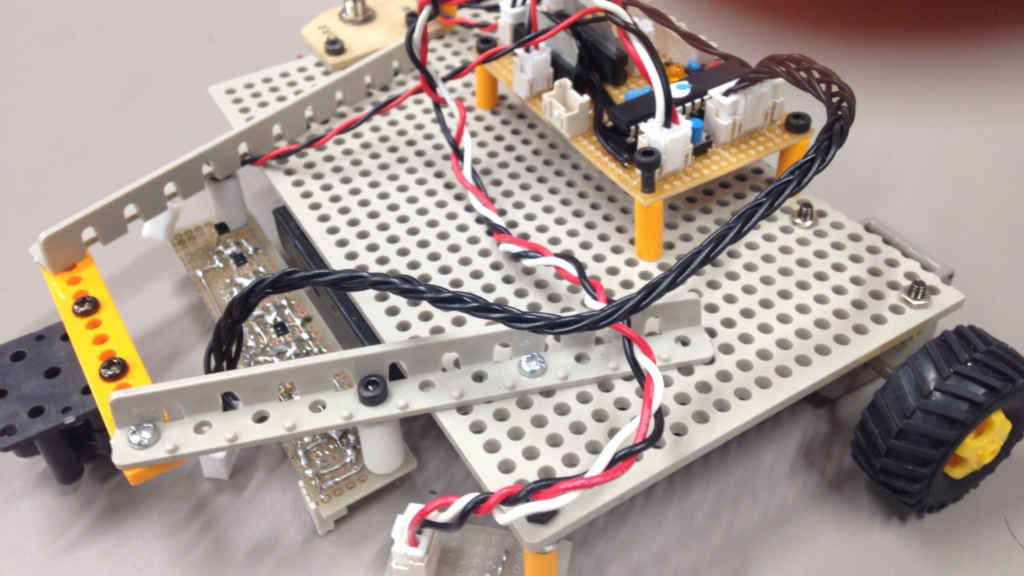
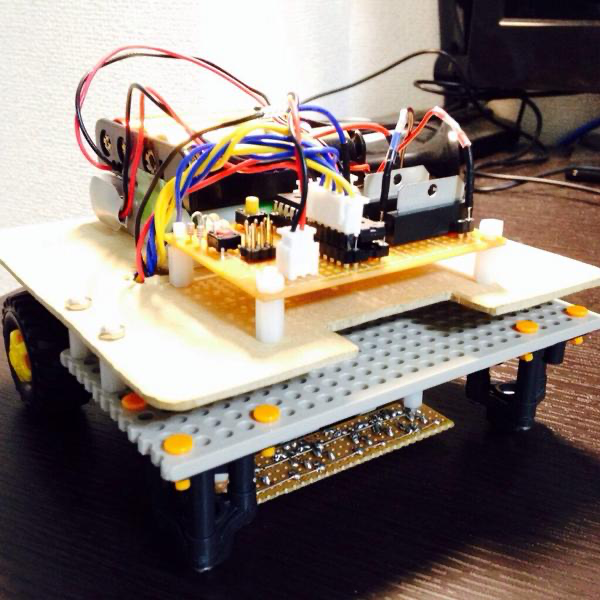
ウォーリー
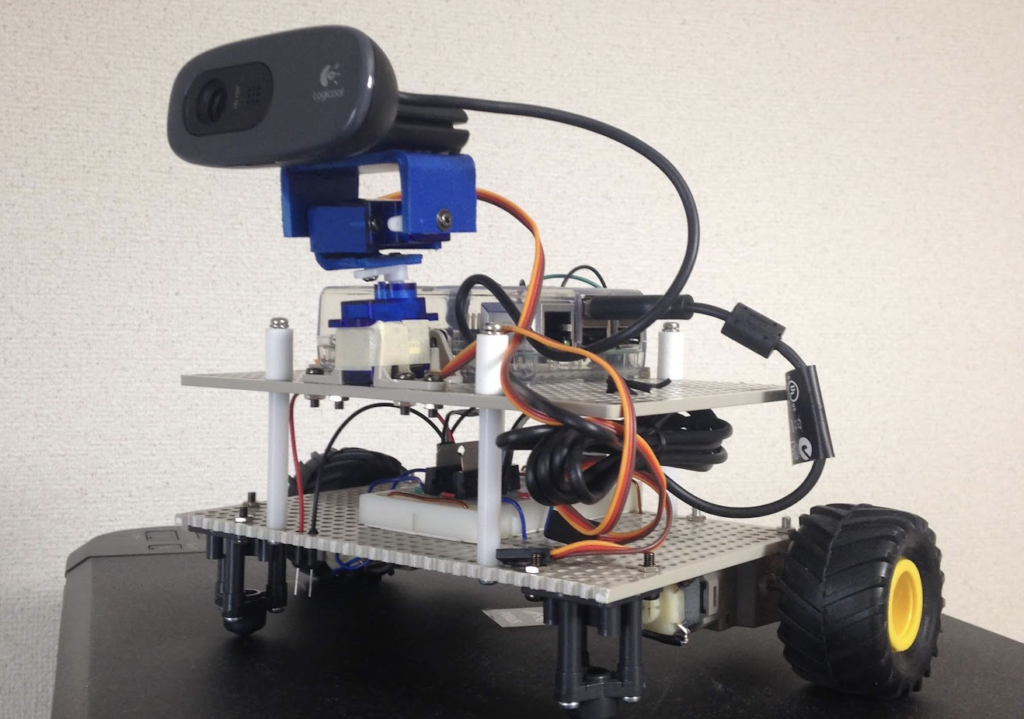
2015年に製作。ラズベリーパイの練習用。足回りはタミヤでお手軽工作。
二自由度お絵かきロボ
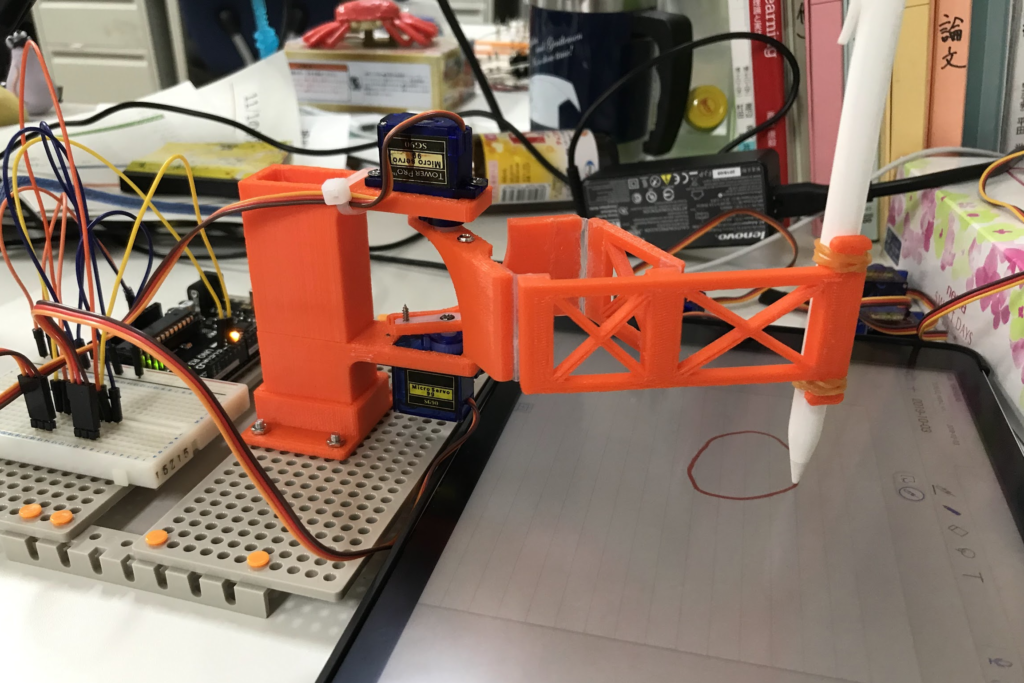
2019年製作。大学のイベントで何か展示を出す必要があり、2日程度で作成。iPadに簡単なお絵かきができる。コンパクトなモータ配置と、軸と軸受を使わない折り紙関節が注目ポイント。制御はArudino Uno。
ジャンプロボ
2017年製作。激しく上下に跳躍するロボ。当時人気だったアニメのキャラクターの着ぐるみをまとっている。
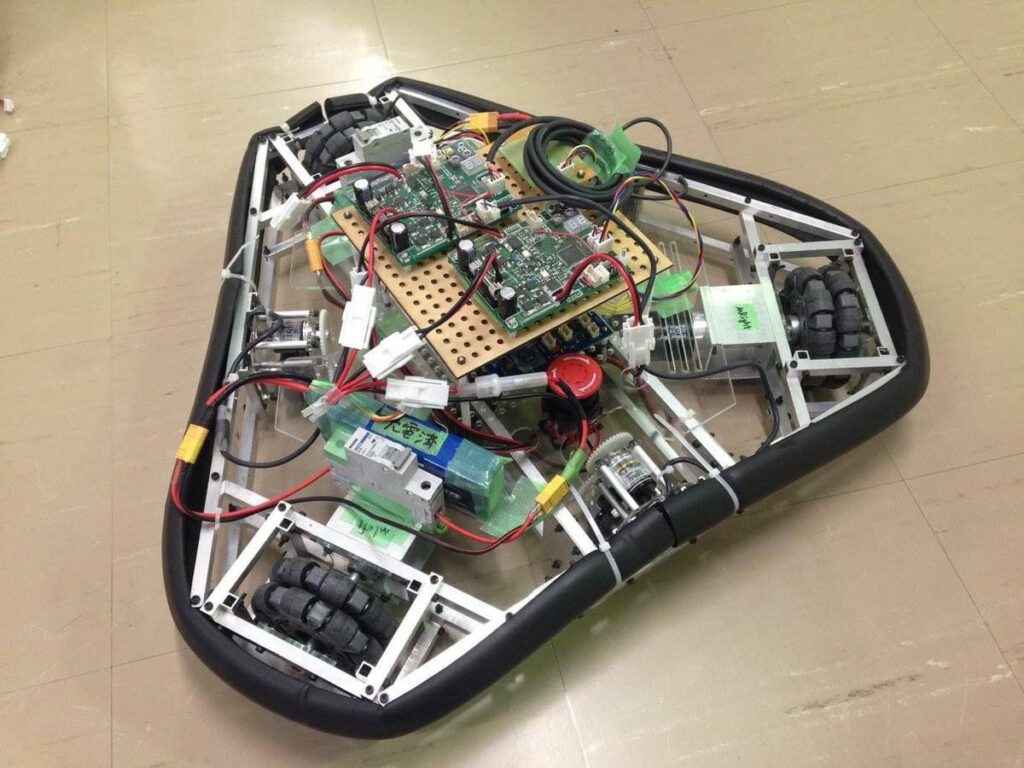
Hybrid Robot
(NHK ROBOCON 2016)
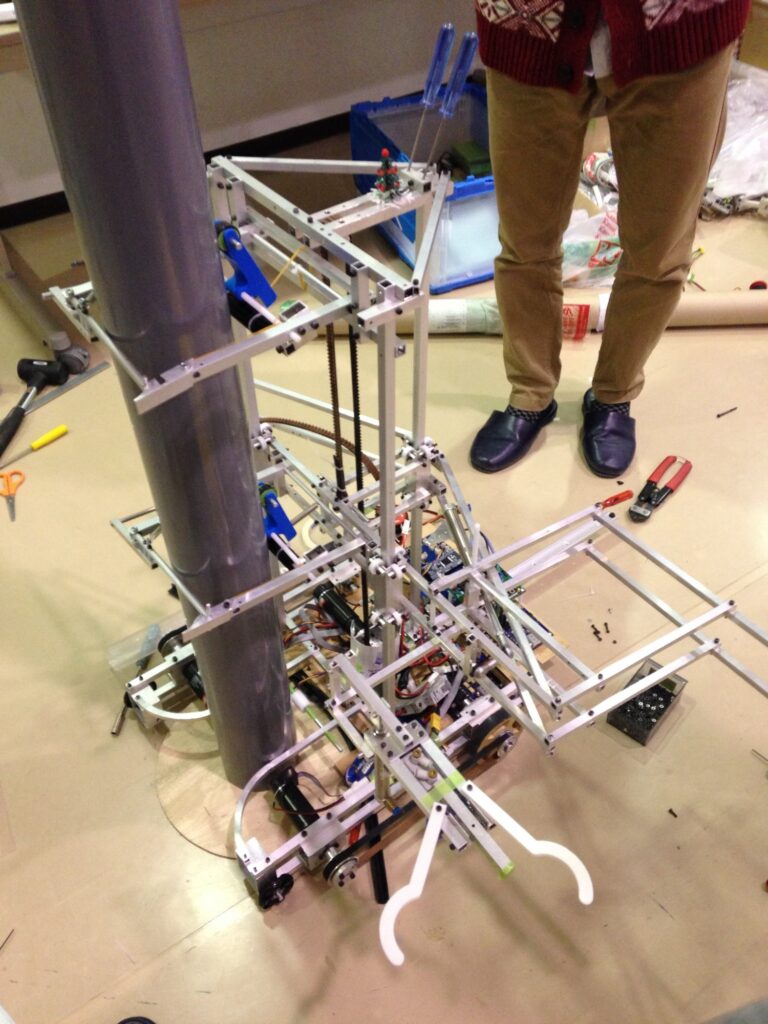

2016年のNHK学生ロボコン「Chai-Yo!」の出場機体。私はチームリーダーとして参加。最高のメンバーに恵まれて、洗練されたロボットが完成した。写真右部はECO Robotに風を送るブラシレスモータファン。他にも、ポールを登る機構や、ロボットハンドを搭載する。
Eco Robot
(NHK ROBOCON 2016)
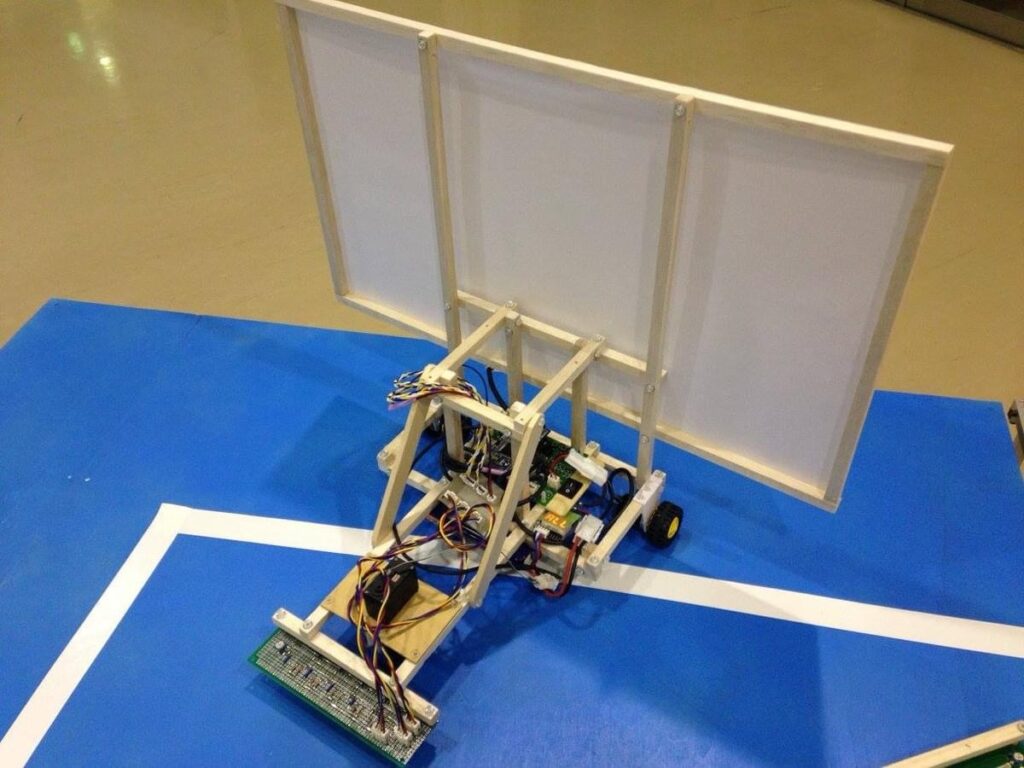
NHK学生ロボコン「Chai-Yo!」の出場機体。私は構造設計を主に担当。バルサ材、樹脂ボルトを用いており、非常に軽量。
三脚振動ロボ

2015年に制作。パラレルリンクで足の方向を変えて、振動で全方向移動をするというアイデアの実証機。
ライントレーサ A
2016年の関西合同ロボコンのための機体。無事完走。
ピッチングマシン

ピン球を遠投するメカを作る、大学内のコンテストの優勝機体。厳しい予算制約の中、工夫を盛り込んだ。非力なモーターの力をトグルリンクで増幅し、ゴムにエネルギーを溜め込んで一気に解放するしくみ。
三輪オムニホイール
2016年に制作。移動ロボットの研究用に設計した足回り。駆動輪とは独立した接地エンコーダを搭載している。シンプルで軽量な構造で、個人的には、その後のチームの足回り設計に影響を与えられた良い機体だったと自負している。
四脚歩行ロボ
2014年に製作。Arduino Unoで12関節を制御して歩行する。逆運動学と歩様への興味がモチベーション。
ライントレーサ NEKOBASU
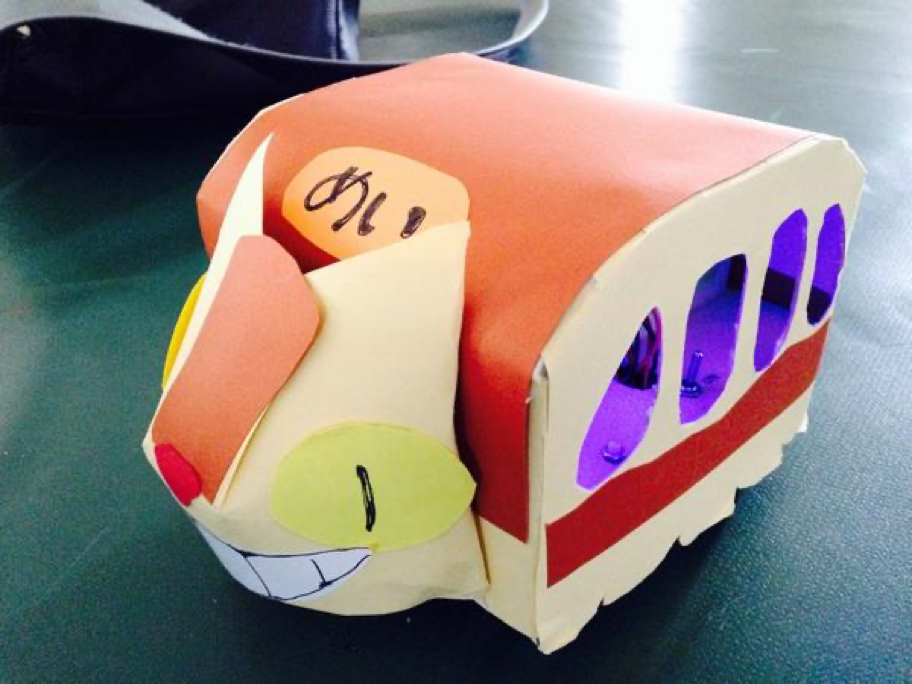
2014年に製作。正方形のボディが特徴で、箱をかぶって走る。関西合同ロボコン2014出場機体。
コアラのマーチロボ
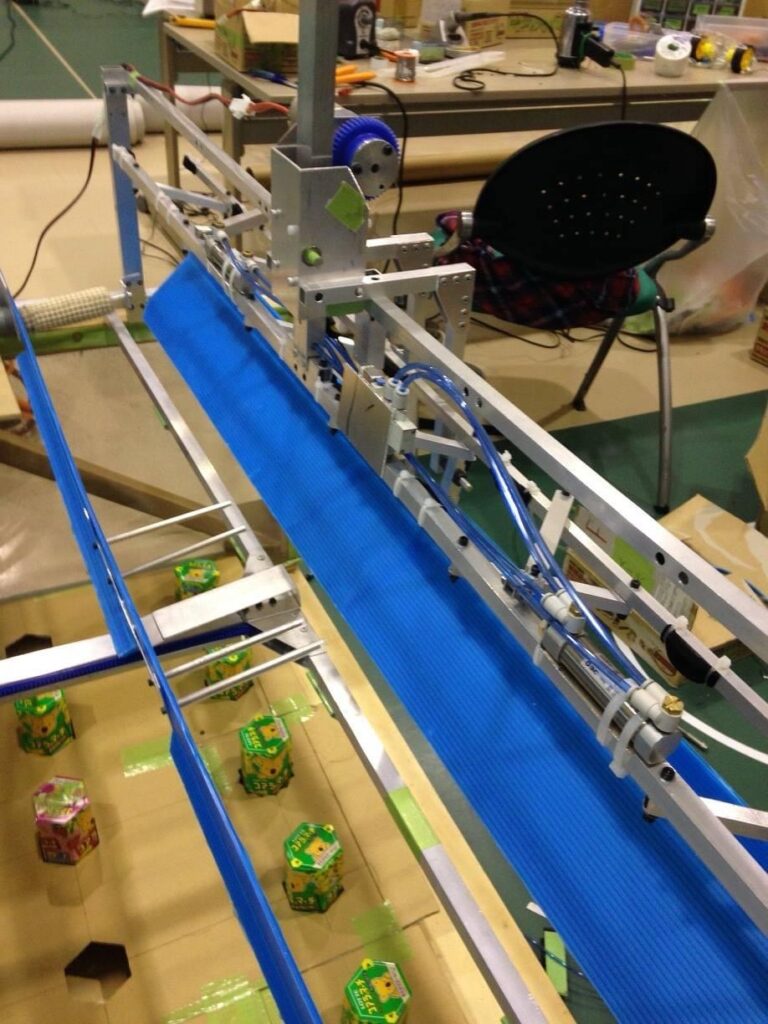
2014年に制作。関西で開催されている、キャチロボバトルコンテストという大会に向け、大学入学後に初めて作ったロボット。コアラのマーチを長いバンドで一気に掴み、ベルトコンベアで搬送する。この制作を通して、アルミ角管の加工や、工作機械の技術を一通り学ぶことができた。
LEGO ライントレーサ
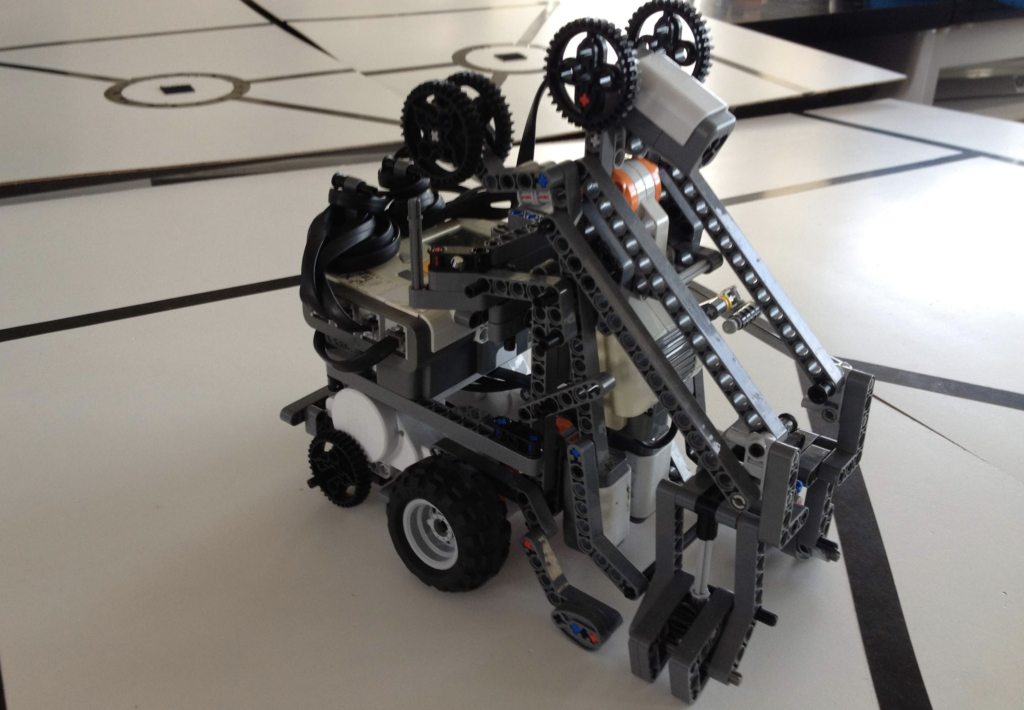
2012年に高校の友達と作成。World Robot Olympiad という大会で活躍した機体。地上の黒線から自己位置を補正しつつ、色のついたブロックを仕分けする。
レスキューロボ
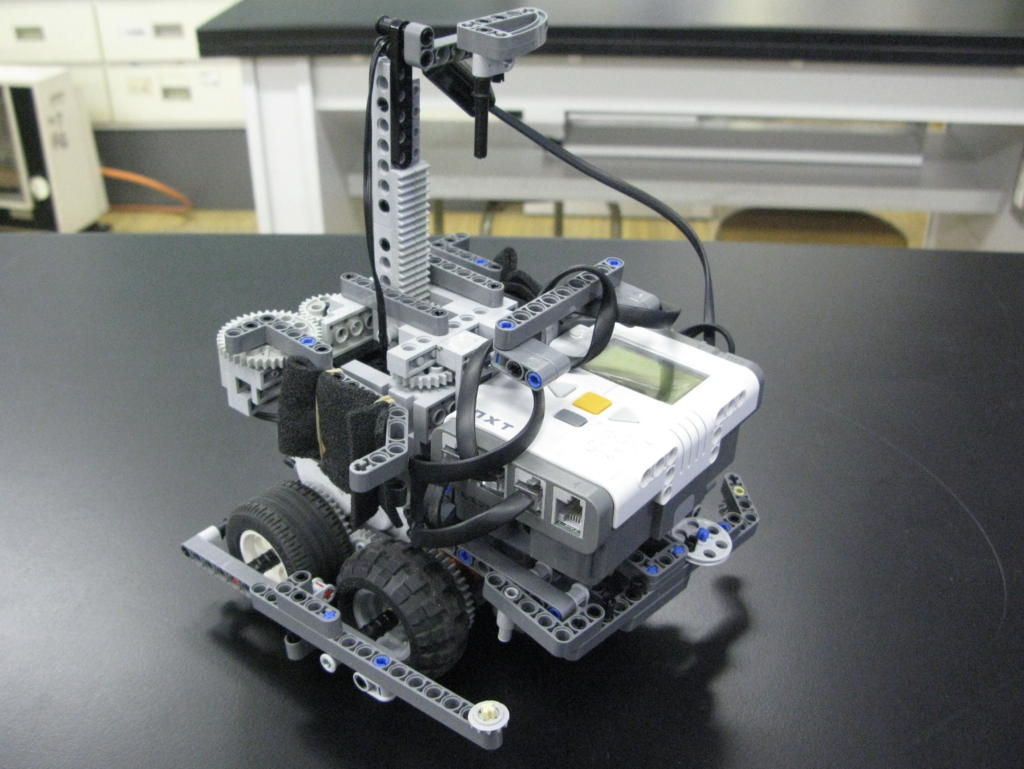
2011年に中学の友達と作成。Robocup Junior Rescueという大会で、地区予選を勝ち抜き、日本大会(Japan Open)に出場。学校の側の100均で、滑りにくいゴム素材を探し回った思い出。
紙コップ運びロボ

2010年に作成。きのくにロボットフェスティバルという大会に出場した際のロボット。平行リンク機構により、紙コップを持ち上げて素早く搬送する。大会優勝機体。
2足歩行LEGOロボット
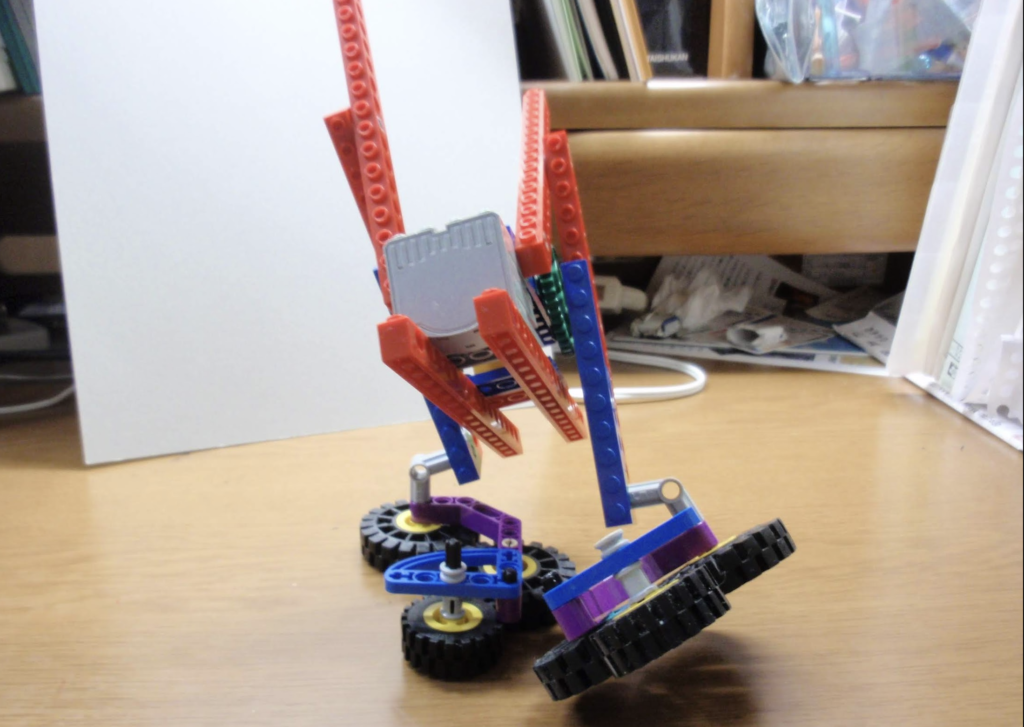
2010年に作成。小学生の頃にサンタさんにもらったLEGOで、中学生時代に作成。試行錯誤しながら、初めてスムーズな歩行を実現した、オリジナルの2足歩行ロボット。モータ1つで、リンク機構によって歩行する。
<工作機械・道具>
3Dプリンタ